This article focuses on system precision and local accuracy as tested in an office environment. For insights into global accuracy and georeferenced accuracy, refer to our testing in a large warehouse, which is detailed in a separate white paper.
Note: The first two sections of this article (the Introduction and Why We Performed These Tests) are identical to those in the previous white paper. If you’ve already read that document, we recommend starting from the Defining Our Terms section below.
TEST RESULTS OVERVIEW
- What was tested. System precision and local accuracy of 3D models generated using LiDAR data from Flyability’s Elios 3, processed with GeoSLAM Connect.
- Who conducted the tests. GeoSLAM 3D mapping experts and members of the Flyability product team.
- Test methods. Local accuracy was evaluated using a Plane-to-Plane analysis, while system precision was assessed through a Range Noise evaluation.
- Reference model. A high-accuracy reference model was created using a Riegl VZ-400 TLS and processed with RiScan Pro V2.14.1.
- Local accuracy results. All comparisons were within +/- 16mm (.63 inches), with a mean absolute normal distance of 8mm (.31 inches) between the Elios 3 model and the reference model.
- System precision results. The standard deviation across all planes was within 15mm (.59 inches), and the mean standard deviation between the Elios 3 and the reference model was 8mm to 1-sigma.
|
Introduction
In recent years, LiDAR has become a cornerstone for creating accurate and precise 3D models. Industries such as mining, construction, and infrastructure rely on these models for inspections, safety assessments, asset tracking, and project planning.
Professionals benefit from detailed digital twins, accurate measurements, defect detection, and the ability to export point cloud data to common formats like *.e57, *.las, *.laz, and *.ply. Merging multiple georeferenced models also helps track changes over time.
The quality of the 3D model is crucial for its usefulness. If the data lacks precision and accuracy—terms with specific definitions in 3D modeling—the model may not accurately represent the real world.
This article presents findings from tests conducted by GeoSLAM and Flyability experts, comparing the Elios 3 with GeoSLAM Connect to leading mobile mapping systems like the ZEB Revo and ZEB Horizon. It focuses on system precision and local accuracy in an office setting.
Why We Performed These Tests
Flyability’s Elios 3 integrates Ouster’s OS0-32 LiDAR sensor with SLAM technology, enabling real-time 3D modeling during flight. After the mission, users can process the data with GeoSLAM Connect to generate accurate point clouds.
The 3D Live Model serves for navigation and route planning, while the post-processed model offers more detailed and precise data. Combining this with the Elios 3's collision-tolerant design makes it ideal for mapping confined spaces.
Potential users may wonder how factors like drone vibrations or environmental conditions affect the quality of the resulting 3D models. To answer these questions, we performed a thorough assessment of system precision and local accuracy using the Elios 3 with GeoSLAM Connect.
Defining Our Terms: Precision and Local Accuracy in 3D Mapping
Understanding precision and accuracy is essential when working with LiDAR-based 3D models.
Accuracy refers to how closely a measured value matches the true value. For example, if your model shows a 100mm measurement but the actual is 500mm, the result is inaccurate.
Local accuracy measures the distance between points in a single view, such as within a room. This article focuses on local accuracy for the Elios 3 and GeoSLAM Connect.
Precision relates to consistency in repeated measurements. High precision means results are tightly clustered, even if they aren’t perfectly accurate.
The required level of precision depends on the application. Mining might need centimeter-level precision, while construction could demand even higher accuracy.
It's important to note that low precision can reduce the reliability of feature identification in a point cloud, making it harder to extract meaningful data.
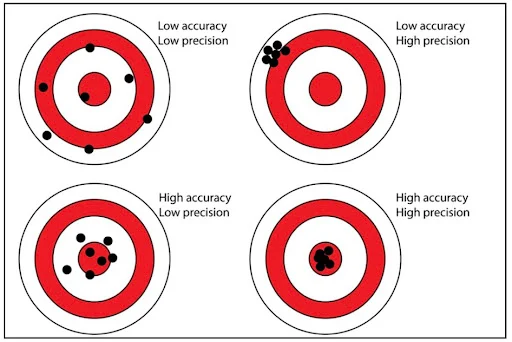 Accurate measurements fall in the bullseye. Precise measurements are tightly clustered.
Accurate measurements fall in the bullseye. Precise measurements are tightly clustered.
System Precision and Local Accuracy Assessments with the Elios 3
To evaluate the performance of the Elios 3 with GeoSLAM Connect, GeoSLAM experts and Flyability engineers conducted:
- A Plane-to-Plane analysis to assess local accuracy
- A Range Noise evaluation to measure system precision
Establishing a Control
When testing accuracy, a control is necessary—a more accurate system used as a benchmark. In this case, we used a Riegl VZ-400 TLS, known for its high accuracy, to create the reference model.
The Riegl VZ-400 has an accuracy of 5mm at 1-sigma, meaning 68% of measurements fall within 5mm. This served as the ground truth for comparison.
Collecting the Data
Data was collected in an indoor environment using both the Elios 3 and the Riegl VZ-400. The TLS provided the reference model, while the Elios 3 captured LiDAR data during flight.
Aligning the Elios 3 Point Cloud to the Reference Model
The Elios 3 point cloud was aligned with the TLS reference model using PolyWorks|Inspector MRS2019 IR3. This involved manual alignment followed by an automated Best-Fit algorithm to minimize differences.
Assessing Local Accuracy—Plane-to-Plane Comparison
Planes were fitted to both the Elios 3 data and the reference model. The Normal Distance between them was calculated, showing a mean of 8mm (.32 inches) with a range of +/- 16mm (.63 inches).
Assessing System Precision—Range Noise Analysis
Range Noise was calculated by analyzing the standard deviation of points on planar surfaces. The results showed a mean standard deviation of 8mm to 1-sigma, indicating high precision.
Test Environment
The test was conducted in a standard office with six planar surfaces, each approximately 1 meter square. The layout is shown in Figures 2 and 3, with the reference model built using the Riegl VZ-400 data.
System Precision and Local Accuracy Test Results
Below are the detailed results from the tests conducted on the Elios 3 with GeoSLAM Connect.
Assessing Local Accuracy
The Plane-to-Plane analysis revealed that all comparisons were within +/- 16mm, with a mean absolute normal distance of 8mm. The results are summarized in Table 1.
|
NameÂ
|
Normal Distance
|
|
Plane 1Â
|
6 mm (.24 inches)
|
|
Plane 2Â
|
0 mm
|
|
Plane 3Â
|
-16 mm (-.63 inches)
|
|
Plane 4Â
|
-10 mm (-.39 inches)
|
|
Plane 5Â
|
-13 mm (-.51 inches)
|
|
Plane 6Â
|
-3 mm (-.19 inches)
|
|
Mean—Absolute Normal DistanceÂ
|
8 mm (.32 inches)
|
Table 1. Local plane-to-plane accuracy
Assessing System Precision
Range Noise analysis showed a mean standard deviation of 8mm to 1-sigma, with all values under 15mm. The results are summarized in Table 2.
|
NameÂ
|
Standard Deviation
|
|
Test 1Â
|
7 mm (.28 inches)
|
|
Test 2Â
|
7 mm (.28 inches)
|
|
Test 3Â
|
8 mm (.32 inches)
|
|
Test 4Â
|
6 mm (.24 inches)
|
|
Test 5Â
|
6 mm (.24 inches)
|
|
Test 6Â
|
15 mm (.59 inches)
|
|
Mean Standard DeviationÂ
|
8 mm (.32 inches)
|
Table 2. Range noise precision
Conclusion
This study evaluated the performance of the Elios 3 with GeoSLAM Connect in a typical office environment. The results were compared against a high-accuracy reference model created using a Riegl VZ-400 TLS.
The Plane-to-Plane analysis showed a mean normal distance of 8mm, while the Range Noise analysis indicated a mean standard deviation of 8mm to 1-sigma.
These results demonstrate that the Elios 3 with GeoSLAM Connect performs well against traditional TLS systems and other leading mobile mapping solutions. It provides reliable precision and accuracy suitable for various industrial applications.
Clutch Master Cylinder For MERCEDES-BENZ
ZHEJIANG BENTENG INTELLIGENT BRAKE SYSTEM CO.,LTD , https://www.cnnakol.com